Biped walking robot
An autonomous two-legged 3D printed robot.
Note
This was me and my teammate's project for Robotics Studio, a class taught by Prof. Hod Lipson at Columbia University.
During my Spring 2025 semester, I enrolled in Robotics Studio, a class offered by Columbia's Mechanical Engineering department taught by Professor Hod Lipson. The goal of the class was to design, build, and program a robot that walks.
My teammate Aleksandr Glamazdin and I decided to challenge ourselves and design a two-legged robot, which is a lot more difficult to balance compared to a 4 or 6 legged alternative.
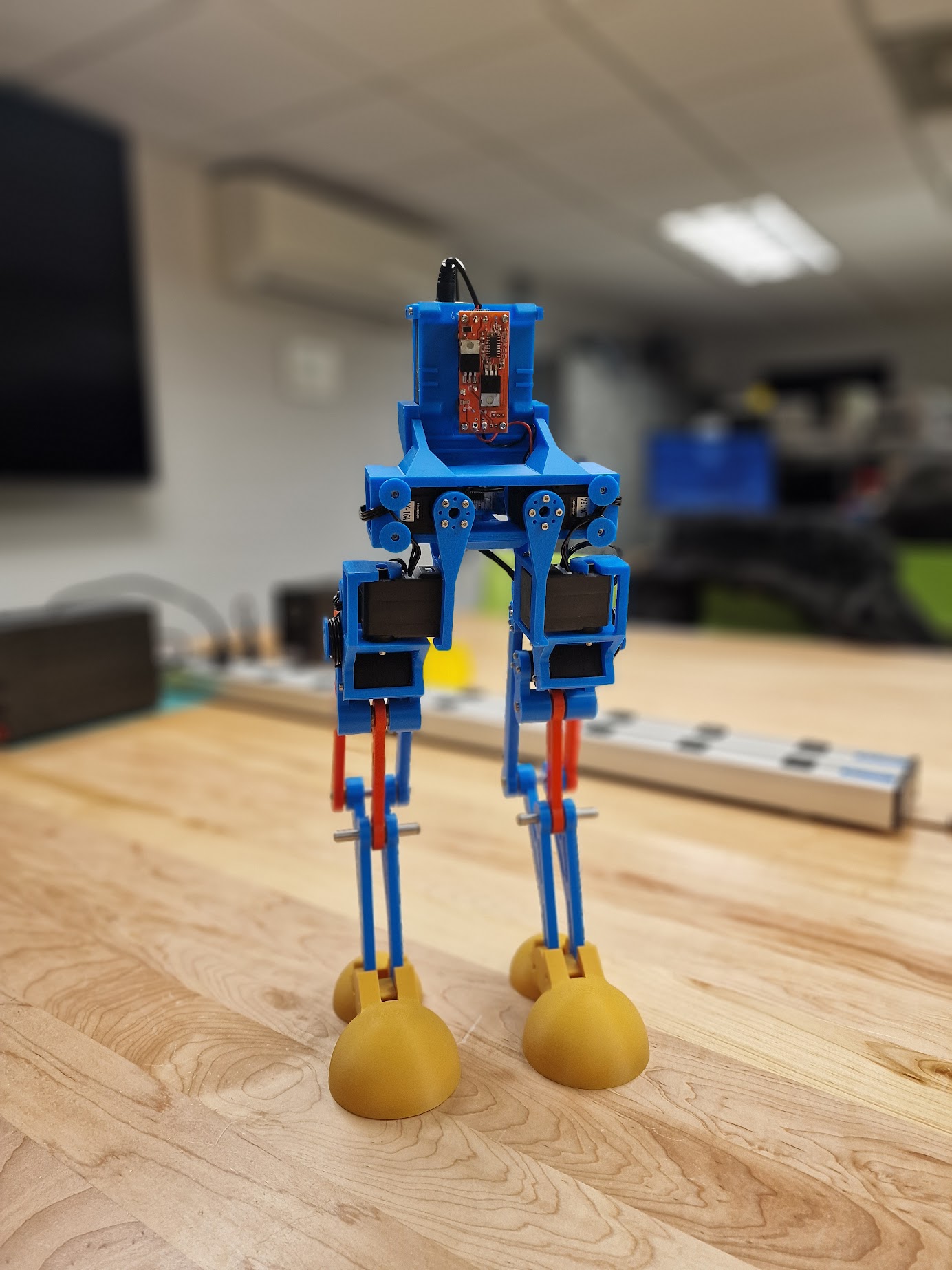
The robot uses 8 servos in an indirect-drive configuration. A Raspberry Pi 4B acts as the brain of the robot, controlling the servos individually to balance the robot and make it walk.